
Page 32 - Revista Fetin
P. 32
Revista Fetin
Revista Fetin 20162016
BIONIC BRACING
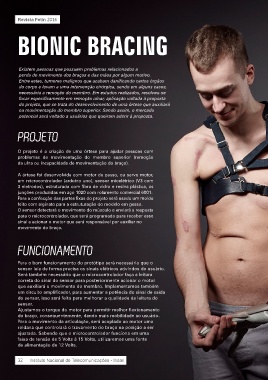
Existem pessoas que possuem problemas relacionados a
perda do movimento dos braços e das mãos por algum motivo.
Entre estes, tumores malignos que acabam danificando certos órgãos
do corpo e levam a uma intervenção cirúrgica, sendo em alguns casos,
necessária a remoção do membro. Em estudos realizados, resolveu-se
focar especificamente em remoção ulnar, aplicação voltada à proposta
do projeto, que se trata do desenvolvimento de uma órtese que auxiliará
na movimentação do membro superior. Sendo assim, o mercado
potencial será voltado a usuários que queiram aderir à proposta.
PROJETO
O projeto é a criação de uma órtese para ajudar pessoas com
problemas de movimentação do membro superior (remoção
da ulna ou incapacidade de movimentação do braço).
A órtese foi desenvolvida com motor de passo, ou servo motor,
um microcontrolador (arduino uno), sensor mioelétrico (V3 com
3 eletrodos), estruturada com fibra de vidro e resina plástica, as
junções produzidas em aço 1020 com rolamento comercial 6001.
Para a confecção das partes fixas do projeto será usado um molde
feito com alginato para a estruturação do modelo em gesso.
O sensor detectará o movimento do músculo e enviará a resposta
para o microcontrolador, que será programado para receber esse
sinal e acionar o motor que será responsável por auxiliar no
movimento do braço.
FUNCIONAMENTO
Para o bom funcionamento do protótipo será necessário que o
sensor leia de forma precisa os sinais elétricos advindos do usuário.
Será também necessário que o microcontrolador faça a leitura
correta do sinal do sensor para posteriormente acionar o motor
que auxiliará o movimento do membro. Implementamos também
um circuito amplificador, para aumentar a potência do sinal de saída
do sensor, isso será feito para melhorar a qualidade da leitura do
sensor.
Ajustamos o torque do motor para permitir melhor flexionamento
do braço, consequentemente, dando mais mobilidade ao usuário.
Para o movimento da articulação, será acoplado ao motor uma
roldana que controlará o travamento do braço na posição a ser
ajustada. Sabendo que o microcontrolador funciona em uma
faixa de tensão de 5 Volts à 15 Volts, utilizaremos uma fonte
de alimentação de 12 Volts.
Instituto Nacional de Telecomunicações - InatelTelecomunicações - Inatel
32
32 Instituto Nacional de